今回は、ラズパイにカメラを接続し、
笑顔になったら、ラズパイのスピーカーからお喋りをさせてみます。
朝一に笑顔を作って、素敵な一日にしたり、
笑顔溢れる家庭にしてみませんか?
ゲームに使っても楽しいかも♪
この記事で以下が学べます。
- Python
- 物体検出(OpenCV)
- 音声合成
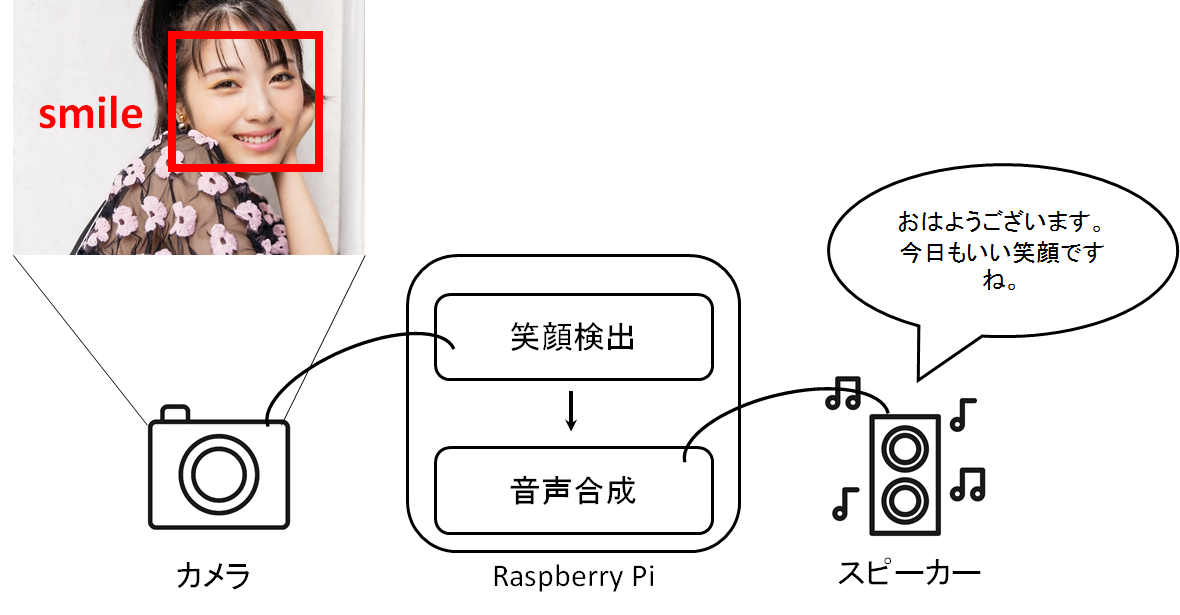
やりたいこと
・カメラが人の笑顔を検出すると、
・「いい笑顔ですね」とスピーカーから発話する
システム構成図
やることリスト
上記の「やりたいこと」をみて、
どんな作業が必要か、自分で項目を考えてみてください。
これを考えることで、「プログラミング的思考」が身に付いていきます。
| 番号 | 作業項目 | 備考 |
| 1 | やりたいこと・システム構成図の作成 | |
| 2 | やることリストの作成 | 作業項目の洗い出し |
| 3 | 部品の準備 | |
| 4 | 笑顔検出 | 物体検出(OpenCV)使用 |
| 5 | 音声合成 | |
| 6 | 以上の機能をまとめて、 やりたいことを実現する! |
部品の準備
今回のシステムに必要な部品です。
不足している部品があれば購入下さい。
| 部品名 | 備考 |
| Raspberry Pi | 別途、電源・SDカード・HDMIケーブルが必要です。 |
| スピーカー | ダイソーのUSBミニスピーカー(300円)がお薦めです。 |
| ラズパイカメラ | Raspberry Pi専用カメラです。 今後、モーターを使ってカメラを動かしたいので、 「Raspberry Pi用遠隔操作カメラキット」を購入します。 |
購入に必要な部品を、
Raspberry Pi 関連に記載しています。
ラズパイは、電源を入れただけでは起動しません。
ラズパイの起動手順の記事を参照ください。

笑顔検出
笑顔を検出する為に、OpenCV(Open Source Computer Vision Library)の、
【物体検出】の機能を使って行きます。
OpenCVは、インテルが開発したオープンソースの画像処理ライブラリです。
笑顔を検出するまでの作業は、以下通りです。
・ラズパイ専用カメラを使う為に、カメラ機能を有効にする
・ラズパイに、OpenCVライブラリをインストールする
・物体検出用の特徴量データのダウンロード
・笑顔を判別するプログラムの作成
その前に、OpenCVで出来ることを確認してみましょう。
OpenCV出来ること一覧
- 画像の読み込み・表示
- 画像の作成・保存
- 画像のトリミング・リサイズ・重ね合わせ
- 画像の回転・上下反転・左右反転
- グレースケール変換・色チャンネル分解・減色処理
- モザイク処理・マスク処理・2枚の画像を合成
- 図形の描画・文字の描画
- ノイズ除去・平滑化・ぼかしフィルタ・メディアンフィルタ・ガウシアンフィルタ
- 物体検出
- テンプレートマッチング
以下記事を参考にしています。
●OpenCVにできることとは?OpenCVの特徴を徹底解説!
https://ai-kenkyujo.com/2021/04/09/opencvtoha/
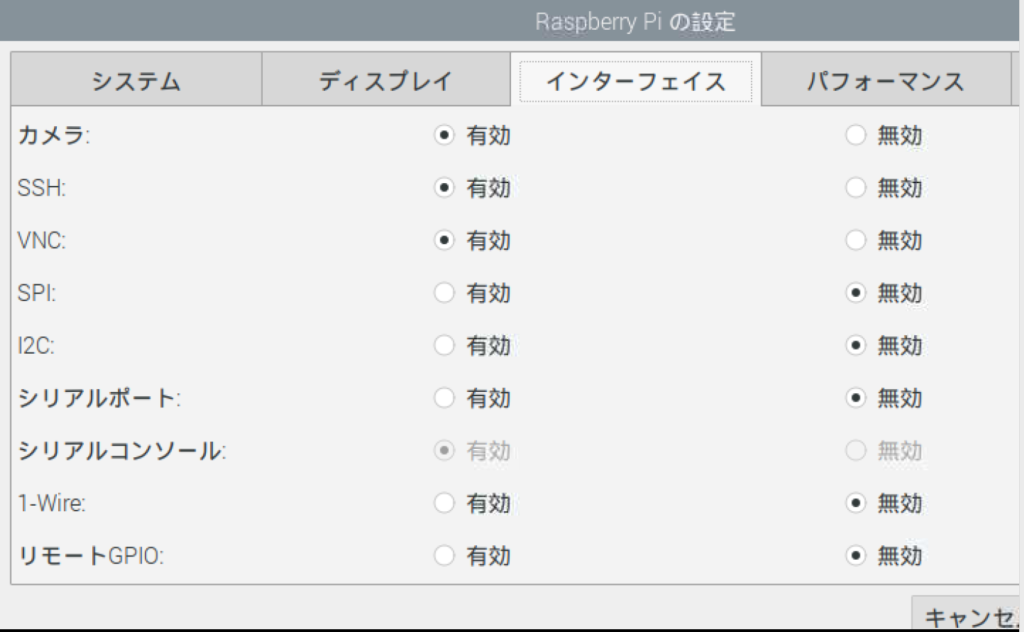
カメラ機能の有効化
ラズパイ専用カメラを使う為に、カメラ機能を有効にします。
左上の「ラズパイアイコン」 → 「設定」→「Raspberry Piの設定」を選択。
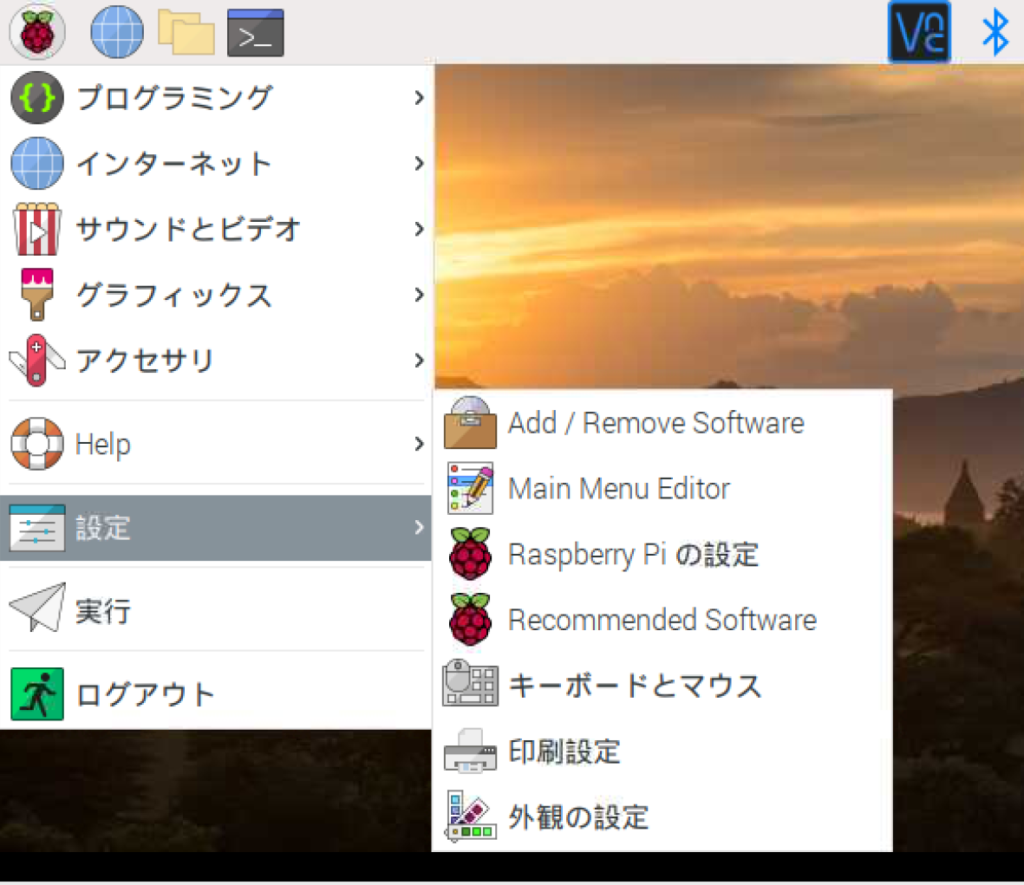
「インターフェイス」タブ → カメラの有効/無効ボタンを「有効」を選択し、
画面右下の「OK」ボタン(画面切れてますが・・・)を押します。
ラズパイを再起動すると設定が反映されます。
OpenCVのインストール
以下コマンドを使って、ライブラリをインストールします。
すみません、ここはちょっと自信ないです。。。色々試したので。
プログラムを実行してエラーが出たら、
エラーが出たライブラリをインストールしてみてください。
sudo apt install python3-opencv「no module named cv2」というエラーが出たら、
pip3 install opencv-python
をインストールしてみてください。
「libcblas.so.3: cannot open shared object files」というエラーが出たら、
sudo apt install libatlas-base-dev
をインストールしてみてください。
カスケード分類器の取得
カメラで撮った画像が何かを判別する為に、
物体の特徴量をまとめたデータ(カスケード分類器)を取得します。
その中に、人の顔や、笑顔の特徴量が含まれています。
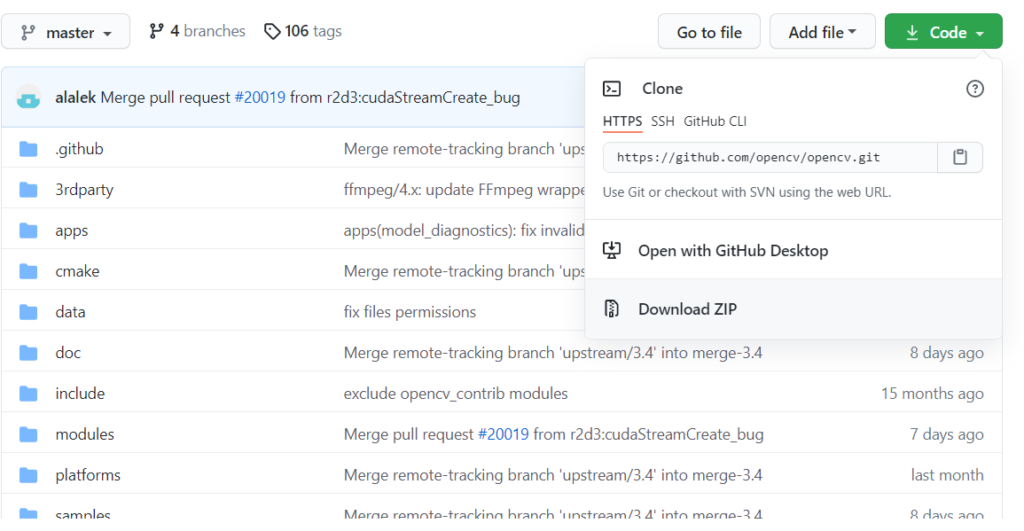
カスケード分類器のダウンロード
以下 OpenCV URLから、ダウンロードします。
https://github.com/opencv/opencv/
「Code」→「Download ZIP」を押して、
ダウンロードを行います。
解凍
以下コマンドで回答する。
unzip opencv-master.zipカスケード分類器は、解凍した以下フォルダ内に入っています。
./opencv-master/data/haarcascades
カスケード分類器一覧
カスケード分類器の一例を上げます。
他にもありますよ。
| ファイル名 | 検出物 |
| haarcascade_smile.xml | 笑顔 |
| haarcascade_frontalface_alt.xml | 正面の顔 |
| haarcascade_eye.xml | 目 |
| haarcascade_fullbody.xml | 全身 |
| haarcascade_eye_tree_eyeglasses.xml | 眼鏡 |
| haarcascade_frontalcatface.xml | 猫の顔 |
プログラム
以下ディレクトリ通り、ディレクトリとファイルを作成する。
この章では、以下赤字のファイルを修正する。
/home/pi/work/camera_smile/
└camera.py
camera.py
# -*- coding: utf-8 -*-
import picamera
import picamera.array
import cv2 as cv
class Camera:
def __init__(self):
# カメラインスタンスの生成
self.camera = picamera.PiCamera()
# 画像インスタンスの生成
self.stream = picamera.array.PiRGBArray(self.camera)
self.camera.resolution = (512, 384)
def detect_smile(self):
detect = False
# カメラ画像の取得
self.camera.capture(self.stream, 'bgr', use_video_port=True)
# grayに変換
grayimg = cv.cvtColor(self.stream.array, cv.COLOR_BGR2GRAY)
# 顔・笑顔検出の為、特徴量の読み込み
face_cascade = cv.CascadeClassifier('/home/pi/Downloads/opencv-master/data/haarcascades/haarcascade_frontalface_default.xml')
smile_cascade = cv.CascadeClassifier('/home/pi/Downloads/opencv-master/data/haarcascades/haarcascade_smile.xml')
# 顔・笑顔検出
faces = face_cascade.detectMultiScale(grayimg, scaleFactor=1.2, minNeighbors=2, minSize=(250, 250))
smiles = smile_cascade.detectMultiScale(grayimg, scaleFactor=1.2, minNeighbors=5, minSize=(40, 40))
# 顔を検出した場合
if len(faces) >= 1:
# 検出した箇所に赤色枠を描画する
for rect in faces:
cv.rectangle(self.stream.array, tuple(rect[0:2]), tuple(rect[0:2]+rect[2:4]), (0, 0, 255), thickness=3)
# 笑顔を検出した場合
if len(smiles) >= 3:
# 検出した箇所に緑色枠を描画する
for rect in smiles:
cv.rectangle(self.stream.array, tuple(rect[0:2]), tuple(rect[0:2]+rect[2:4]), (0, 255, 0), thickness=3)
detect = True
# 画像をWindowに表示
cv.imshow('camera', self.stream.array)
# 画像を破棄する
self.stream.seek(0)
self.stream.truncate()
return detect
def check_stop(self):
stop = False
if cv.waitKey(100) > 0:
stop = True
return stop
def stop_camera(self):
# 全てのWindowを閉じる
cv.destroyAllWindows()
if __name__ == '__main__':
camera = Camera()
while True:
if camera.detect_smile():
print('smile detect')
if camera.check_stop():
print('camera stop')
camera.stop_camera()
break
実行
コマンドラインから、先程作成した camera.py のディレクトリに移動し、
以下コマンドでプログラムを実行する。
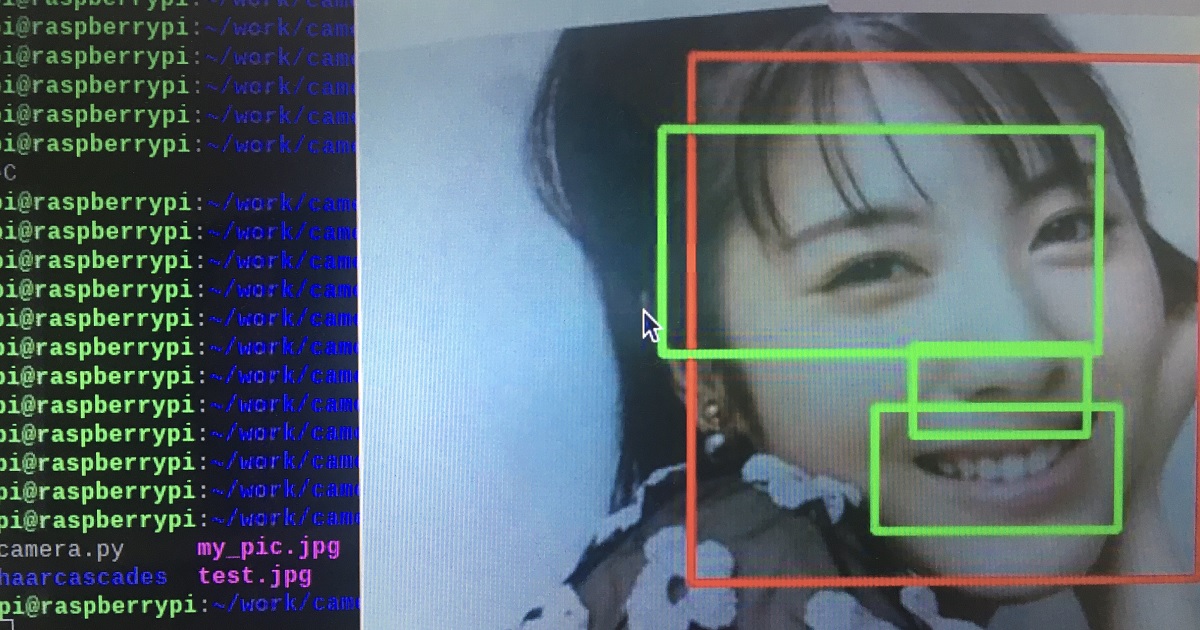
本プログラムでは、
カメラで取得した画像に、
顔の検出結果は「赤色枠」、笑顔の検出結果は「緑色枠」が表示されます。
笑顔の検出は、目(2つ)、鼻、口を検出してそうだったので、
3か所以上検出して初めて「笑顔」と判別するようにしています。
終了するには、画像のWindowをアクティブにした状態で、
何かしらキーを押してください。
python3 camera.py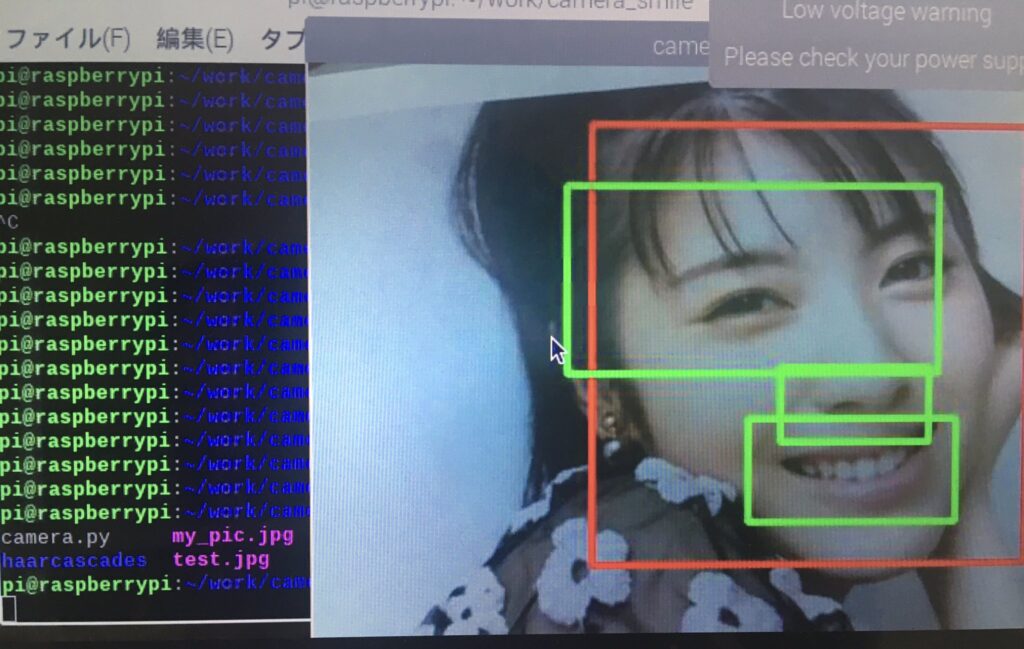
音声合成
以下記事を参照ください。

機能のまとめ
まとめです。
これまで作成した上記機能を組み合わせて、
【笑顔判定機】を作って行きます。
プログラム
この章では、以下赤字のファイルを修正します。
それ以外は、上記ファイルのままで使用します。
/home/pi/work/camera_smile/
├app.py・・・main処理
├camera.py・・・笑顔判定処理
└talk.py・・・文字列を音声に変換し、スピーカーから音声出力
app.py
# -*- coding: utf-8 -*-
import camera
import talk
SMILE_JUDGE = 3
if __name__ == '__main__':
camera = camera.Camera()
smile_count = 0
while True:
if camera.detect_smile():
print('smile detect')
smile_count += 1
else:
smile_count = 0
if camera.check_stop():
print('camera stop')
camera.stop_camera()
break
if smile_count >= SMILE_JUDGE:
smile_count = 0
talk.talk(f'おはようございます。今日もいい笑顔ですね。')
実行
コマンドラインから、先程作成した app.py のディレクトリに移動し、
以下コマンドでプログラムを実行する。
本プログラムでは、笑顔判定を3回連続パスしないと
発話してくれません。
SMILE_JUDGEの数を変えることで発話の難易度を変えることが出来ます。
終了するには、画像のWindowをアクティブにした状態で、
何かしらキーを押してください。
最後に
如何だったでしょうか?
いい笑顔は出来ましたか?
他にも、
・物体検知のパラメータを変更したら、検知しやすくなるか、検知しにくくなるか、
・発話内容を変えてみたり、
・発話する箇所をメールを送る処理に変えてみたり、
などなど、色々試してみると楽しいですよ♪
今後も、Raspberry Pi と Python を使ってワクワクするモノを作って行きます。
楽しみにしていてくださいね。
記事を更新するとTwitterでつぶやきます。
あと、下のTwitterアイコンからフォローしてもらうと、
記事を書くモチベーションが上がります♪
フォローお待ちしています。
以下記事では他にも色んな電子工作を作っています。
あなたが作りたいモノのヒントがあれば嬉しいです。

記事を更新するとTwitterでつぶやきます。
フォローしてもらうと、記事を書くモチベーションが上がります。
下のTwitterアイコンからフォローお願いします。
不明な点があればページTOPの「お問い合わせ」にてご連絡下さい。
もし一人で作るのが難しかったら、
一緒に作るサービスをしています。
お気軽に ページTOPの「お問い合わせ」にてご連絡下さい。